
'입실론' 6호와 'H3' 등 최신형 로켓을 연달아 잃은 일본이 첫 달 착륙을 시도한다. 일본은 지난 4월 민간 업체에 의한 달 착륙에 도전했다가 실패했다.
일본 우주항공연구개발기구(JAXA)는 27일 공식 채널을 통해 소형 달 착륙선 '슬림(SLIM)'과 X선 분광 촬영 위성 '크리즘(XRISM)'을 탑재한 'H-IIA' 로켓이 28일 발사된다고 전했다.
'H-IIA' 로켓은 이날 오전 9시26분 일본 다네가시마 우주센터에서 솟아오를 예정이다. 당초 26일을 발사일로 잡았다가 기상 상황을 고려해 두 차례 일정을 연기했다. 28일도 어렵다고 판단되면 29일부터 오는 9월 15일까지 예비 기간 동안 미션 진행 여부를 결정한다.
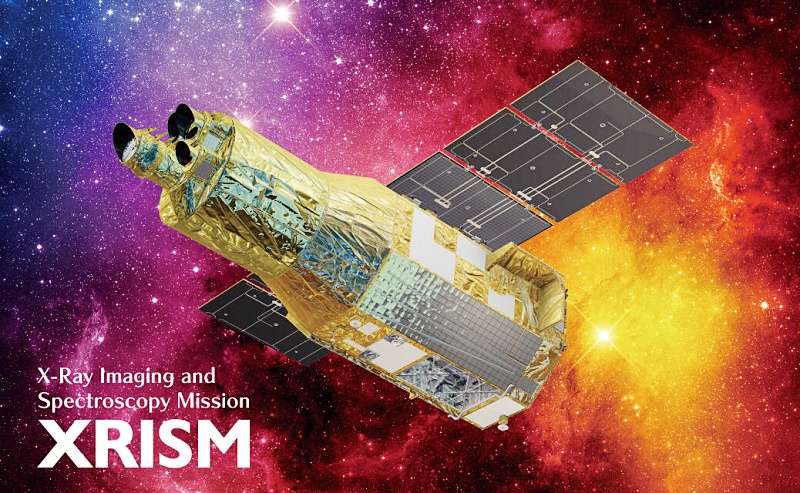
이번 미션은 JAXA와 미쓰비시중공업이 공동으로 진행한다. '크리즘'은 일본의 X선 관측 위성 '히토미'의 임무를 이어받게 되며, 미 항공우주국(NASA)과 유럽우주국(ESA)이 개발에 협력했다.
JAXA는 "'크리즘'에 탑재된 광시야 X선 촬영기와 X선 분광기는 성간 공간이나 은하 사이의 플라즈마 속도를 측정하고 거기 포함된 원소를 측정할 것"이라며 "별이나 은하가 구성하는 거대한 구조의 미스터리에 접근할 수 있을 것"이라고 설명했다.
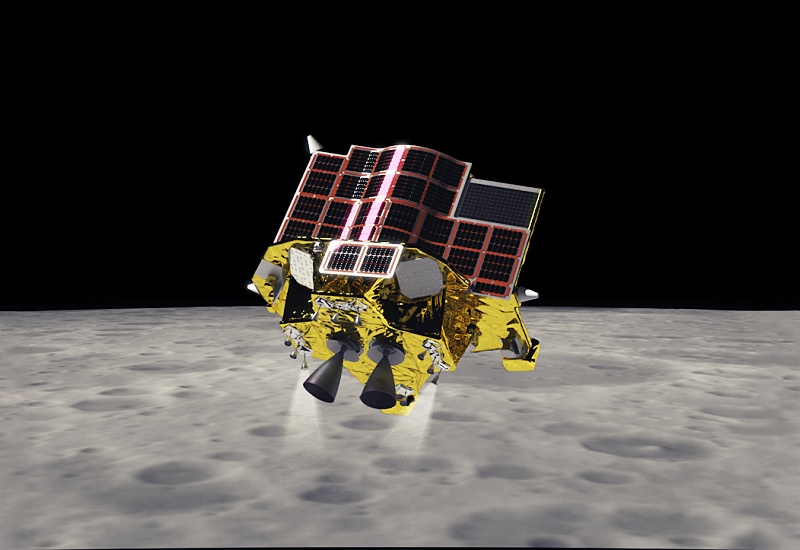
이어 "'슬림' 착륙선은 계획 대비 100m 이내 오차로 기체를 내리는 핀포인트 착륙(pinpoint landing) 기술을 검증하기 위해 제작됐다"며 "'슬림'은 이를 위해 2단계 착륙 기술을 활용, 달 표면에 착륙하기 직전 기체를 비스듬히 기울여 정확한 지점에 접지할 계획"이라고 덧붙였다.
'슬림' 착륙선의 2단계 착륙 기술은 달의 경사면에 대비해 만들어졌다. 지금까지 착륙선은 대부분 수직으로 달 표면에 접지했지만 목표 지점을 벗어나 경사면에 닿게 되면 기체 손상이 불가피하다. 100m 오차 이내의 핀포인트 착륙을 실현하기 위해서는 지표면을 가리지 않아야 하기에 지면의 상태에 최적화된 각도로 탐사선의 자세를 조정하는 2단계 착륙 기술이 필수다.
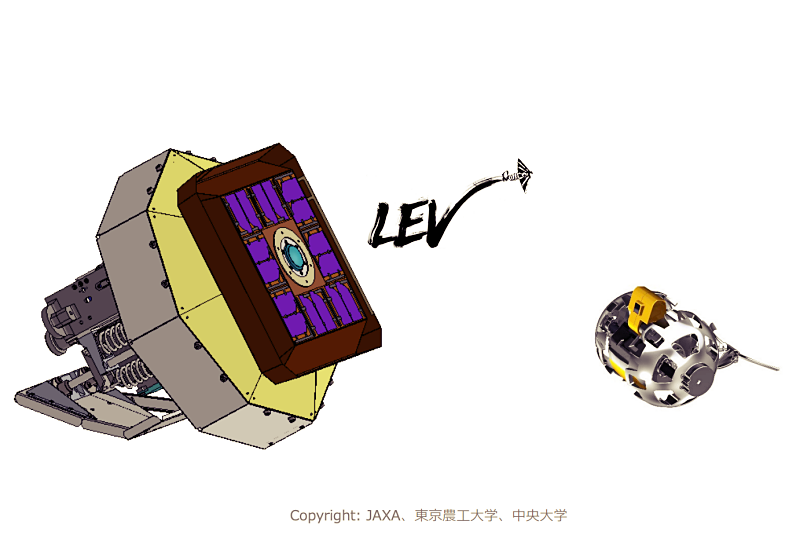
이 착륙선에는 일본 완구 회사 타카라토미가 만든 소형 달 탐사 로봇 '소라큐(SORA-Q, 이번 미션에서는 LEV-2로 통칭)'와 지구 송수신기 'LEV(Lunar Excursion Vehicle)-1'이 실리게 된다.
'소라큐'는 지난 4월 26일 착륙 도중 추락한 일본 민간 우주개발 업체 아이스페이스의 '시리즈-1'에도 탑재됐다. '소라큐'는 야구공 크기로 달 표면에 닿으면 동체 양쪽이 벌어지며 주행을 시작한다. 'LEV-1'은 '소라큐'가 달 주행 과정에서 촬영한 사진 등 다양한 정보를 지구로 전송할 계획이다.
정이안 기자 anglee@sputnik.kr












