일본 달 착륙선 '슬림(SLIM)'의 핀포인트 착륙(pinpoint landing)이 성공한 것으로 확인됐다. 일본은 최대 수십 ㎞에 달했던 과거 탐사 장비들의 착륙 오차가 50m대로 줄어든 점에 의미를 부여했다.
일본 우주항공연구개발기구(JAXA)는 25일 공식 채널 및 SNS를 통해 '슬림'이 지난 20일 달 표면에 핀포인트 착륙한 사실을 파악했다고 발표했다.
JAXA에 따르면, '슬림'은 달 강하 당시 총 2기로 구성된 메인 엔진 중 하나가 고장을 일으켰다. 그럼에도 최종적으로 '슬림'은 원래 목표로 삼은 시올리 크레이터 부근 착륙 지점에서 불과 약 55m 떨어진 곳에 무사히 내려앉았다.

JAXA는 "목표 지점에서 오차 100m 이내 접지를 목표로 하는 핀포인트 착륙 기술은 이로써 실증됐다"며 "각국이 쏘아 올린 탐사 장비는 최대 수십 ㎞까지 접지 오차를 냈지만 '슬림'은 목표로 한 최저 정밀도(100m)의 약 2배를 실현했다"고 강조했다.
'슬림'이 세계 최초의 달 핀포인트 착륙을 이뤄낸 데는 JAXA가 고안한 2단계 착륙 기술이 주효했다는 평가다. JAXA는 "2단계 착륙 기술은 오로지 평평한 면에 수직으로 내리는 그간의 탐사선과 달리 기체를 비스듬히 누운 상태로 접지할 수 있다"며 "착륙 자세의 관용성을 높인 이 기술 덕분에 '슬림'의 핀포인트 착륙이 가능했다"고 전했다.

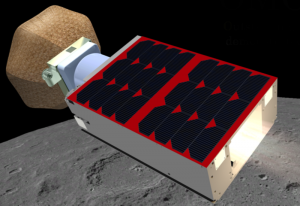
20일 오전 0시20분 달에 내려앉은 '슬림'은 강하 과정에서 'LEV-1과 'LEV-2(소라큐)' 등 페이로드 사출도 정상적으로 실시했다. 타카라토미는 자사 기술로 만든 야구공 모양의 변신 달 탐사 로봇 '소라큐'가 촬영한 '슬림' 사진을 JAXA와 함께 공개, 관심을 모았다.
한편 '슬림'은 태양전지가 태양 쪽으로 향하지 않는 자세 문제로 현재까지 발전이 이뤄지지 않고 있다. 착륙 과정에서 이를 인지한 JAXA는 기체가 달 표면에 안착한 뒤 약 2시간이 지난 20일 오전 2시57분 전원을 차단했다. 이 시점에서 기체에 남은 배터리 잔량은 약 12%로 전해졌다.
정이안 기자 anglee@sputnik.kr