코끼리 특유의 신체 구조를 응용한 로봇 설계에 공학계의 관심이 쏠렸다.
프랑스 파리 소르본대학교 연구팀은 최근 실험 보고서를 내고 코끼리의 코 움직임에 착안한 로봇 개발이 진행 중이라고 전했다.
펭귄이나 플라밍고 등 인간에게 없는 다른 동물의 신체 구조는 로봇 연구의 아이디어로 활용돼 왔다. 소르본대 연구팀은 이전부터 아프리카코끼리의 코 끝에 어느 정도의 힘이 모이는지, 물건을 잡는 능력은 어떤 수준인지 분석해 왔다.

조사 관계자는 "과거 연구들은 코끼리가 물체를 코 끝으로 감아 들어 올릴 때 걸리는 힘에 집중하는 경향이 있었다"며 "우리 연구는 힘뿐만 아니라 물건의 형태나 무게에 다른 코끼리 코 구조의 변화를 들여다봤다"고 말했다.
이 관계자는 "우리는 코끼리가 전보다 강한 힘으로 물체를 쥐면 사과를 보상으로 주는 새로운 실험을 실시했다"며 "코끼리가 사과를 먹기 위해 물체를 강하게 잡는 과정에서 코가 발휘하는 악력의 최대치를 파악할 수 있었다"고 덧붙였다.
연구팀은 동물원에 사육하는 아프리카코끼리 암컷 5마리를 조사한 결과, 물체를 집을 때 코의 움직임 패턴이 4가지임을 알아냈다. 코끼리는 코를 똑바로 뻗거나(A) 코 끝을 비틀어 옆에서 물건을 집었다(B). 코를 비틀며 똑바로 뻗을 때도 있었고(C), 코를 비튼 상태에서 옆으로 물건을 잡는 패턴(D)도 확인됐다.
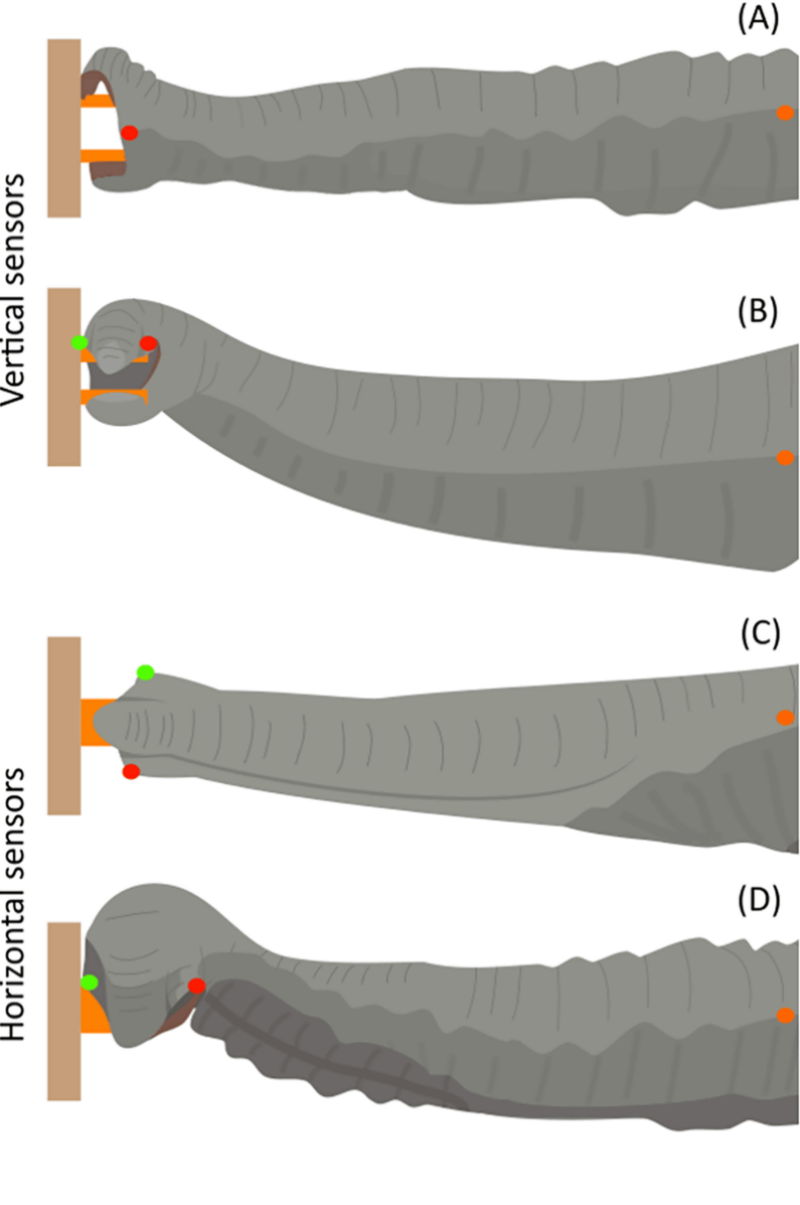
코끼리 코로 물체를 움켜잡는 힘은 A가 최대 86.4뉴턴으로 가장 강했다. 1뉴턴은 1㎏의 물체를 1m/s2로 가속시키는 힘이다. 사람의 엄지와 검지 사이의 힘이 49~68뉴턴이라는 점에서 코끼리 코의 쥐는 힘은 생각보다 세지 않음을 알 수 있다.
조사 관계자는 "코끼리는 의외로 약한 힘을 써 물체를 단단히 쥐는 동물로, 코 끝의 각 부분에 걸리는 힘이 다르다는 사실을 알 수 있었다"며 "이런 독특한 메커니즘은 경량 로봇이 적은 에너지로 무거운 물체를 들어 올리는 소프트 그리퍼 기술에 적합하다"고 말했다.
정이안 기자 anglee@sputnik.kr