
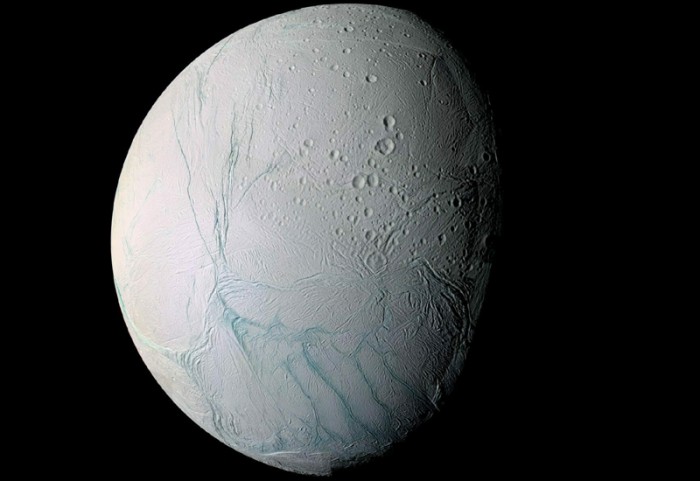
미 항공우주국(NASA)이 지구 외 생명체 탐사 프로젝트를 공식 추진한다. 바다가 존재하는 천체에 소형 로봇을 투입하는 이번 미션의 목표물은 목성 위성 유로파와 토성 위성 엔켈라두스다.
NASA는 최근 공식 홈페이지를 통해 유로파 및 엔켈라두스를 대상으로 한 소형 로봇 탐사 프로젝트 ‘SWIM’을 본격화한다고 발표했다.
‘센싱 위드 인디펜던트 마이크로-스위머(Sensing With Independent Micro-Swimmer)’의 앞 글자를 딴 ‘SWIM’은 말 그대로 독립형 마이크로 스위머를 이용한 생명 감지 활동이다. 유로파와 엔켈라두스의 얼음 표면 아래에 있을 것으로 추측되는 바다를 로봇들이 헤엄치며 탐사하는 미션이다.
유로파와 엔켈라두스의 바다는 태양계 내 생명체의 존재가 기대되는 유력한 곳들이다. 오는 2030년대 NASA 목성 탐사선 ‘유로파 클리퍼’가 그 증거를 찾아 유로파 상공을 플라이바이(근접 통과)할 예정이다.

‘SWIM’은 NASA 이노베이티브 어드밴스 콘셉트(NASA Innovative Advanced Concept, NIAC) 프로그램의 일환으로 진행된다. 프로젝트명 ‘SWIM’이 곧 로봇 이름이기도 하다. NASA는 유로파와 엔켈라두스가 기본적으로 얼음으로 된 천체지만 두꺼운 껍질 아래 바다가 존재하며, 이곳을 소형 로봇으로 뒤져 생명체 존재 여부를 알아낼 방침이다.
이번 프로젝트는 유로파와 엔켈라두스의 바다를 직접 탐색하자는 아이디어에서 시작됐다. 우선 각각의 위성까지 소형 착륙선을 보내야 한다. 얼음으로 된 두 천체의 표면에 내려앉은 착륙선은 원자력 전지 열을 이용해 얼음을 녹인다.
터널을 파는 식으로 두꺼운 얼음 아래로 내려간 탐침은 차가운 바다가 나올 때까지 연장된다. 바닷물까지 도달한 탐침은 일단 멈춘 뒤, 여기서 로봇 50기를 사출한다.

개발될 로봇의 길이는 대략 12㎝다. 추진기와 컴퓨터, 초음파 통신기, 센서(온도, 염분, 산성도, 압력, 화학물질 탐지)가 탑재된다. 총 50대의 로봇들은 물고기 떼처럼 헤엄치면서 생명체의 증거를 샅샅이 살핀다. 무리의 선두와 맨 끝의 기체가 측정치를 비교해 온도나 염분 농도의 균일성을 실시간 측정한다.
NASA는 “얼음 위에서 대기하는 착륙선은 로봇들을 위성까지 옮기는 것은 물론 중계기 역할도 수행한다”며 “ 각 SWIM 로봇으로부터 받은 데이터를 지구로 전송하거나 운영팀으로터 수신한 새로운 명령을 각 기체에 전달한다”고 설명했다.
이어 “로봇은 활동성이 중요해 유선형을 적용할 예정이다. 현재 후보는 날렵한 오징어 또는 삼각형 보트 형태”라며 “각 로봇은 만약의 사태가 벌어질 경우 상호 기능을 보완하면서 탐색 활동을 이어가도록 설계될 것”이라고 덧붙였다.
참신함이 돋보이는 이 프로젝트는 학계에서도 꽤 주목받고 있다. 그저 구상일 뿐 실제 로봇 개발 및 위성 투입이 가능할지 불분명했으나 NASA가 자금 출원을 결정하면서 사업이 추진력을 얻게 됐다.
NASA는 프로젝트를 기획한 NASA 제트추진연구소(JPL) 로봇공학자 에단 샬러 및 개발팀에 향후 연구자금으로 60만 달러(약 7억8300만원)를 NIAC을 통해 지원할 계획이다. NASA는 이 프로젝트가 무리 없이 실행될 경우 2년 뒤에는 그럴듯한 로봇이 완성될 것으로 내다봤다.
정이안 기자 anglee@sputnik.kr












