일본 완구업체가 만든 소형 변신 로봇이 조만간 달 탐사 임무를 띠고 장도에 오른다.
일본 우주항공연구개발기구(JAXA)는 15일 공식 채널을 통해 민‧관‧학이 공동 개발한 트랜스포머 로봇 소라큐(SORA-Q)가 올해 달 탐사 프로젝트에 참가한다고 발표했다.
타카라토미와 JAXA, 소니, 도시샤대학교가 공동 개발한 소라큐는 야구공 크기의 작은 변신 로봇이다. JAXA의 ‘우주탐사 이노베이션 허브’ 프로젝트의 일환으로 탄생한 이 로봇은 그간 다양한 변신 로봇 완구를 만든 타카라토미의 기술이 집약됐다.
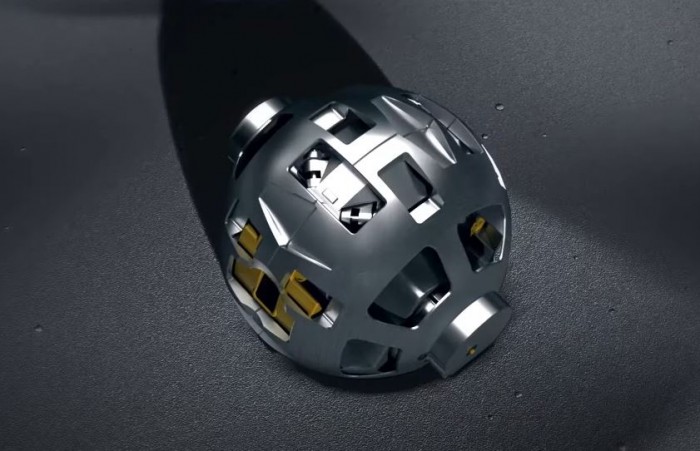
소라큐는 직경 약 8㎝, 무게 약 250g의 초소형·경량 로봇이다. 몸체를 변형시켜 달 표면을 자유자재로 주행할 수 있다. 달의 저중력 환경에서 초소형 로봇 탐사기술을 실증하는 것이 주요 임무다. 이를 위한 몇 가지 미션이 이미 부여됐다.
JAXA의 소형 달 착륙선 슬림(SLIM)으로부터 구체 모양으로 달 표면에 방출될 소라큐는 달 표면을 덮은 레골리스(퇴적층) 위를 자유롭게 주행할 예정이다. 이 과정에서 몸체에 장착된 소형 컴퓨터가 작동 로그를 모아 저장한다.
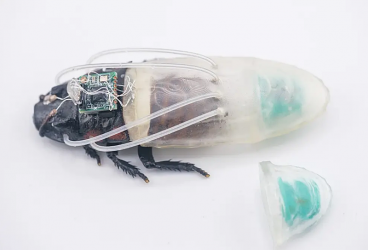
소라큐에 탑재된 전후방 2대의 카메라는 쉴 새 없이 주변을 촬영해 지구로 전송한다. 전방 카메라는 주위 상황을 찍고 후방 카메라는 주행 때문에 달 표면에 생긴 흔적을 주로 담아낸다.
주목할 것은 구체에서 순식간에 이뤄지는 변신이다. 타카라토미에 따르면 소라큐는 슬림으로부터 방출되자마자 구체를 좌우로 확장, 달 표면을 주행 가능한 탐사기로 탈바꿈한다. 버터플라이 또는 크롤 모드로 주행 가능하며, 넘어져도 다시 위치를 잡고 일어설 수 있다.
JAXA 관계자는 “소라큐가 수집한 데이터들은 슬림에 탑재된 소형 프로브 레브원(LEV-1)이 달 표면에 방출하는 블루투스를 이용해 지구로 전송된다”며 “슬림 발사 시기는 2022년이며, 달 착륙은 발사 후 4~6개월 후로 예정하고 있다”고 설명했다.
정이안 기자 anglee@sputnik.kr