
국제우주정거장(ISS) 러시아 구획에서 진행된 선외 활동에서 유럽 로봇 팔이 최초로 가동됐다. 암(arm) 길이가 무려 10m가 넘는 이 로봇 팔은 무리 없이 작동돼 향후 활약을 예고했다.
유럽우주국(ESA)는 1일 공식 홈페이지를 통해 지난 4월 28~29일 러시아 우주비행사 2명에 의한 ISS 선외 활동이 실시됐으며, 다목적 실험 모듈 ‘나우카(Nauka)’에 장착된 로봇 팔 ‘유러피언 로보틱 암(European Robotic Arm, ERA)’가 처음 가동됐다고 전했다.
ERA는 ISS의 러시아 구획에서 주로 운용하기 위해 개발됐다. 암 전체 길이는 11.3m이고 관절 수는 7개다. 3개의 관절을 갖춘 손목 2개와 중간 팔꿈치 1개로 구성되는 로봇 팔의 관절 자유도는 7이다.
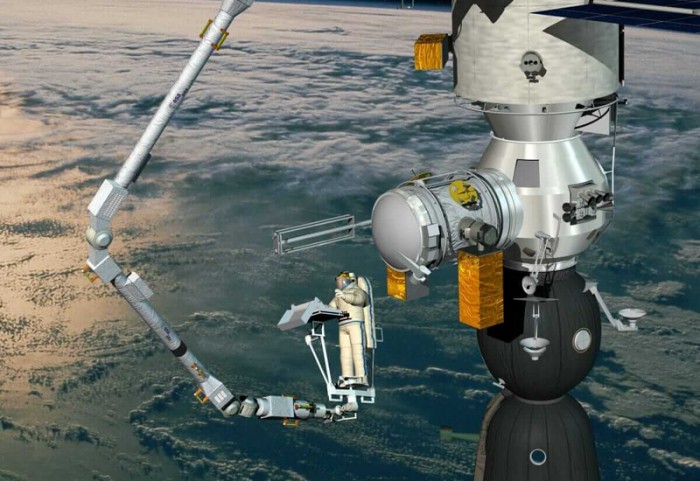
암 양단에는 일반 로봇 팔처럼 작업 대상에 직접 작용하는 엔드 이펙터(end-effector)도 마련됐다. 나우카의 외장이나 실험 장치 등 경우에 따라 파지 포인트를 자유롭게 잡을 수도 있다. ESA에 따르면 ERA는 최대 8t 무게의 실험 장비 등을 5㎜ 위치 결정 정밀도로 다룰 수 있다.
ESA 관계자는 “로봇 팔은 선내와 선외 어느 쪽에서도 조작 가능하다”며 “ERA를 활용하면 ISS 러시아 구획에서도 굳이 선외 활동을 하지 않고 실험 장비를 ISS 밖에 설치할 수 있게 된다”고 설명했다.
이어 “ERA는 선외 활동 중인 우주인의 이동을 돕기 위해서도 사용할 수 있다”며 “러시아연방우주국(ROSCOSMOS) 소속 올레그 아르테비예프와 데니스 마트비예프 등 두 비행사가 4월 28일 밤 11시58분부터 선외 활동을 성공적으로 수행했다”고 덧붙였다.

실제로 두 비행사는 ERA를 보호하던 단열재나 발사 시 잠금 기구를 제거하고 처음 가동한 암이 파지 포인트 중 하나를 잡을 때까지 움직임을 점검했다. 이들은 4월 29일 오전 7시40분 ISS 선내로 돌아와 7시간 42분간의 선외 활동을 성공적으로 마쳤다.
ESA는 “선외활동 종료로부터 얼마 지나지 않아, 선내에 머무르던 세르게이 코르사코프 비행사에 의해 두 번째 파지 포인트를 잡는 작업이 완료됐다”며 “이번 임무에서는 장래 활동에 대비해 나우카의 외장에 몇 개의 난간을 추가하는 것도 가능했다”고 전했다.
미 항공우주국(NASA)에 따르면 러시아 우주인들의 ISS 선외 활동은 올해 들어 다섯 번째, 통산 250번째였다. ISS 러시아 구획 우주인들은 향후 ERA의 작업 준비를 계속하는 한편, 나우카의 소형 에어록 기동 작업을 위한 선외활동을 진행할 계획이다.
정이안 기자 anglee@sputnik.kr












