일본 민간 업체 아이스페이스(ispace)의 달 착륙선 '시리즈-1'은 소프트웨어 문제로 추락한 것으로 결론이 났다.
아이스페이스는 26일 공식 채널을 통해 '시리즈-1' 착륙선의 고도를 측정하는 소프트웨어 이상을 확인했다고 발표했다.
회사 관계자는 "무인 달 착륙선 '시리즈-1'은 착륙 단계에서 고도를 판단하는 소프트웨어가 오작동, 추정 고도에 오차가 생긴 것으로 확인됐다"고 설명했다. 이어 "고도를 잘못 인식한 소프트웨어 탓에 '시리즈-1'은 계획했던 소프트랜딩이 완전히 불가능했다"며 "달 표면에 그야말로 자유낙하하고 말았다"고 덧붙였다.

착륙선의 비행 데이터를 분석한 아이스페이스에 따르면, '시리즈-1'은 착륙 시퀀스에 돌입해 초속 약 1m의 예정 강하 속도로 달 표면에 접근했다. 고장을 일으킨 소프트웨어가 추정 고도를 0으로 인식한 시점에서 실제 고도는 무려 5㎞였다. 추진제가 떨어진 '시리즈-1'은 수직 강하 속도가 갑자기 빨라져 달 표면에 충돌했다.
'시리즈-1'은 지난 4월 26일 새벽 1시40분 (한국시간) 달 표면 얼음의 바다 남동쪽 아틀라스 크레이터에 착륙할 예정이었다. 성공하면 일본 최초, 그리고 민간 업체의 첫 세계 달 착륙이어서 많은 관심을 받았다.
아이스페이스가 제작한 '시리즈-1'은 가로 2.6m, 높이 2.3m의 소형 달 착륙선이다. 일본의 첫 달 착륙 프로젝트 '하쿠토(HAKUTO)-R' 미션을 띠고 지난해 12월 11일 스페이스X의 '팰컨9' 로켓에 실려 미국 플로리다 케이프 커내버럴 우주군 기지에서 발사됐다.
'시리즈-1'에는 일본 완구 회사 타카라토미의 초소형 달 탐사 로봇 '소라큐(SORA-Q)'를 비롯해 아랍에미리트 최초의 달 탐사차 '라시드(Rashid)' 등 페이로드가 탑재됐다. '소라큐'는 야구공 형태의 변신 로봇으로 달 표면의 주행 상황을 촬영해 지구로 전송할 예정이었다.
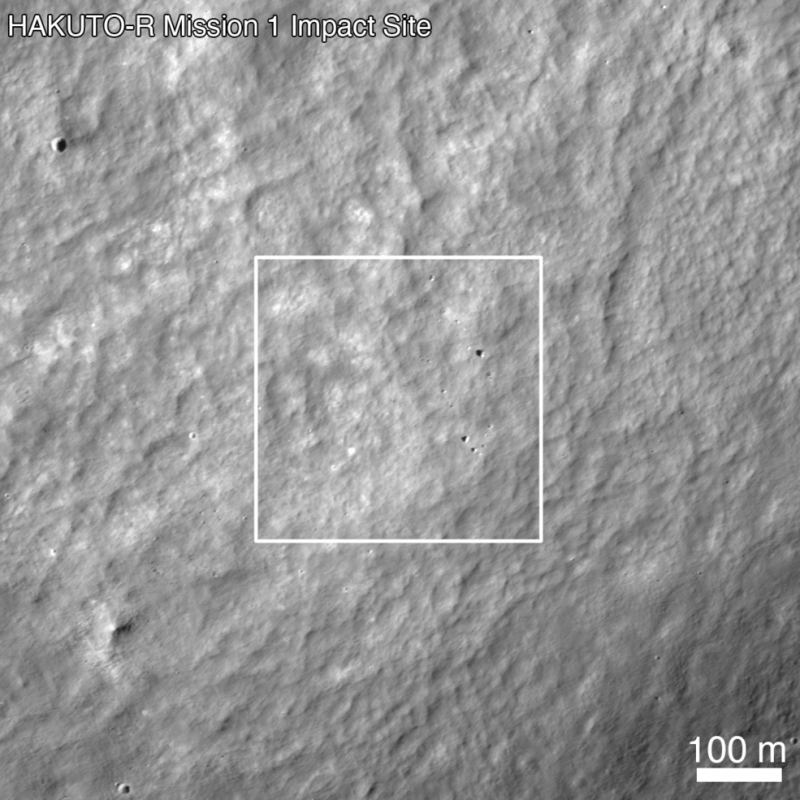
미 항공우주국(NASA)은 지난 23일 월 주회 위성 'LRO'가 촬영한 '시리즈-1' 착륙선의 추락 지점 사진을 공개했다. 사진에는 착륙선의 것으로 보이는 파편이 담겨 충돌 당시 충격을 가늠할 수 있다.
일본은 '하쿠토-R' 미션에 앞선 지난해 11월 최초의 달 착륙을 시도했다. NASA가 제작한 차세대 로켓 '스페이스 론치 시스템(SLS)'에 실려 발사된 달 탐사선 '오모테나시'는 예정 고도에서 사출됐으나 기체의 이상 회전이 감지되면서 일본 우주항공연구개발기구(JAXA)는 결국 미션 실패를 선언했다.
정이안 기자 anglee@sputnik.kr