스프링이 회전할 때 생기는 불안정성을 이용해 지네처럼 자유롭게 움직이는 다족 로봇이 일본에서 개발됐다. 로봇 하면 휴머노이드같이 이족보행을 떠올리기 쉽지만, 다양한 용도에 사용되는 다족 로봇 연구도 활발하다.
일본 오사카대학교 아오이 신야 교수(기계역학)는 7일 SNS를 통해 좌우 이동이나 선회 시 소모되는 에너지를 획기적으로 줄인 다족 보행 로봇을 공개했다.
지난달 말 오사카대학교가 발표한 논문에 먼저 실렸던 이 로봇은 스프링의 회전에 따른 불안정성을 인위적으로 제어해 좌우 이동 및 선회 시 에너지 소모를 최소화했다.
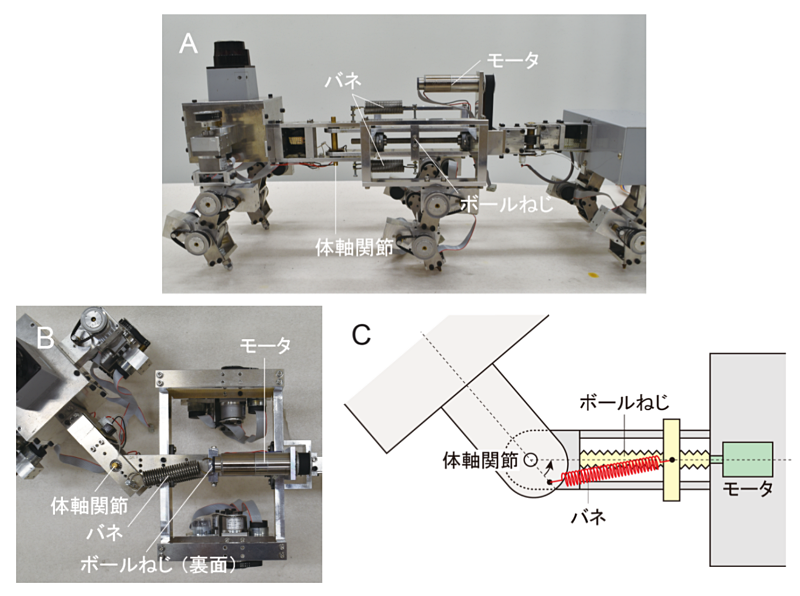
2016년에도 다족 로봇을 제작했던 아오이 신야 교수 연구팀은 7년에 걸친 추가 연구에서 다족 로봇의 몸통들을 연결하는 체축에 회전 스프링을 넣는 방법을 떠올렸다.
아오이 신야 교수는 "체축에 장착된 회전 스프링은 어느 정도 강성을 유지할 때는 로봇을 똑바로 걷게 하고, 일정 수준 강성이 약해지면 좌우로 구부러진다"며 "이런 성질을 제어할 수 있다면 다족 로봇의 에너지를 덜 쓰면서 보다 빠르고 안정적으로 움직일 수 있다"고 전했다.
다족 로봇은 활용 범위가 꽤 넓다. 잔해가 널브러진 건물 붕괴 현장 등 사람이 진입하기 어려운 곳에서 생존자를 수색할 수 있다. 공중을 나는 드론과 연계하면 골든타임 안에 생존자를 여럿 찾아낼 수 있다는 게 아오이 신야 교수의 설명이다.
특히 다족 로봇은 땅에 닿는 다리가 많아 쉽게 넘어지지 않고 다리 일부가 고장 나도 보행이 가능해 우주개발에도 적극 도입되고 있다. 달처럼 레골리스 부스러기가 거칠고 단단한 천체에서는 이런 로봇이 맹활약할 것으로 기대된다.
다족 로봇의 많은 발은 장점인 동시에 단점이기도 했다. 각 다리의 움직임을 제어하려면 CPU의 계산이 복잡하고 방대해지고 에너지 소모량도 증가한다. 또한 보행 중 급선회 등 움직임을 구현하기 어려웠다. 이런 점에서 아오이 신야 교수팀이 고안한 스프링 체축 구조는 획기적이라는 게 오사카대학교 입장이다.
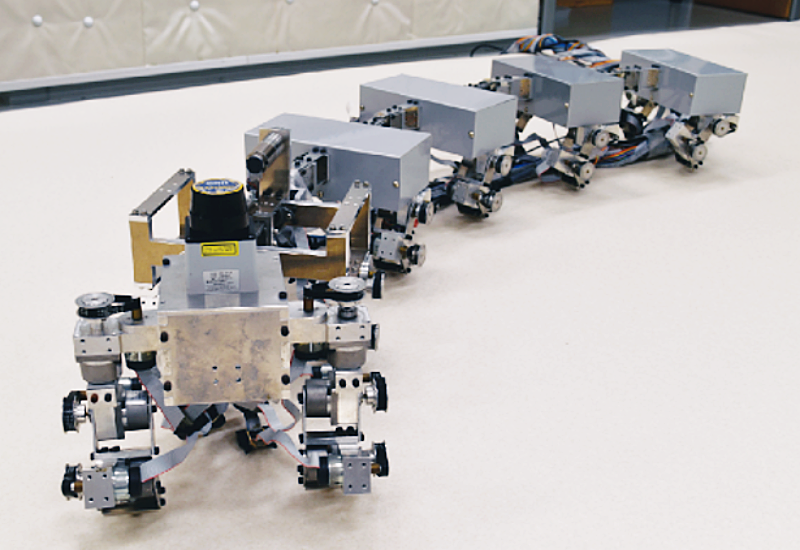
현재 완성된 다족 로봇은 체절 6개와 체축 5개로 구성되며 총 길이는 약 1m다. 체절을 연결하는 체축에 강성 조절이 가능한 회전 스프링이 들어갔다. 만약 로봇이 똑바로 걷지 못할 역학적 상황에 놓이면 이 스프링이 조절돼 몸 전체를 좌우 한쪽으로 순식간에 구부릴 수 있다. 어느 쪽으로 구부릴지는 머리에 부착된 카메라를 통해 판단한다.
아오이 신야 교수는 "로봇 역학에서 불안정성은 원래 배제해야 할 요소지만 지네의 움직임을 관찰하는 과정에서 이를 활용할 아이디어가 떠올랐다"며 "생물이 움직이는 메커니즘을 로봇에 응용하는 것은 여러모로 많은 도움이 된다"고 설명했다.
정이안 기자 anglee@sputnik.kr