일본우주항공연구개발기구(JAXA)의 달 착륙선 ‘슬림(SLIM)’이 내년 1월 20일 달 표면 안착을 시도한다. 성공할 경우 ‘슬림’은 일본 최초의 달 착륙 타이틀을 갖게 된다.
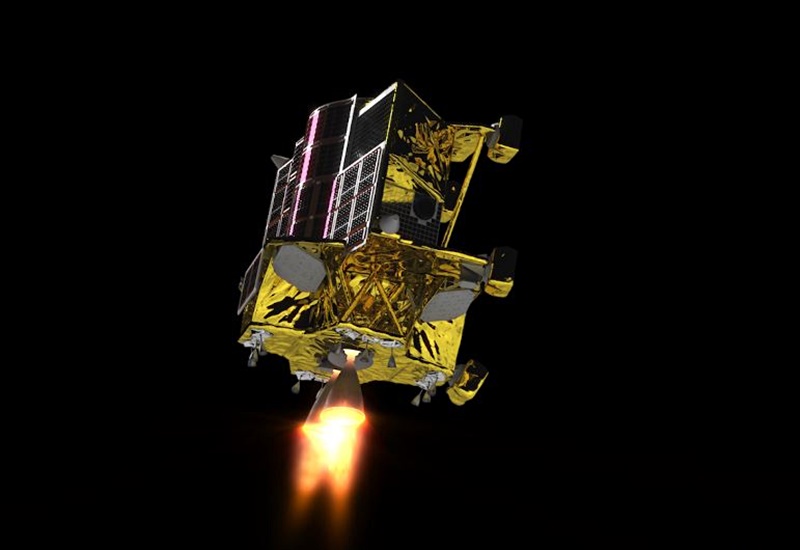
JAXA는 6일 공식 채널을 통해 ‘슬림’의 달 착륙 미션이 내년 1월 20일로 정해졌다고 발표했다. ‘슬림’은 달 표면에 대한 핀포인트(pinpoint landing) 착륙 기술을 실험하기 위해 제작된 소형 착륙선이다.
‘슬림’은 지난 9월 7일 JAXA의 X선 분광 촬영 위성 ‘크리즘(XRISM)’과 함께 ‘H-IIA’ 로켓에 실려 다네가시마 우주센터에서 발사됐다. 약 한 달이 지난 10월 4일 지구를 공전하는 달의 중력을 이용해 궤도를 수정하는 달 스윙바이에 성공했다.
‘슬림’은 오는 2024년 1월 20일 0시경(한국시간) 달 표면 착륙을 위한 강하를 시작한다. 만약 상황이 여의치 않을 경우 다음 미션 일정은 오는 2024년 2월 16일로 정해졌다.
JAXS 관계자는 “‘슬림’은 오는 12월 25일 달 궤도에 진입하고 내년 1월 19일에는 달 착륙을 위한 궤도 조정을 실시한다”며 “수직 착륙이 아닌 핀포인트 방식을 시도하기 때문에 많은 관심이 쏠려 있다”고 전했다.
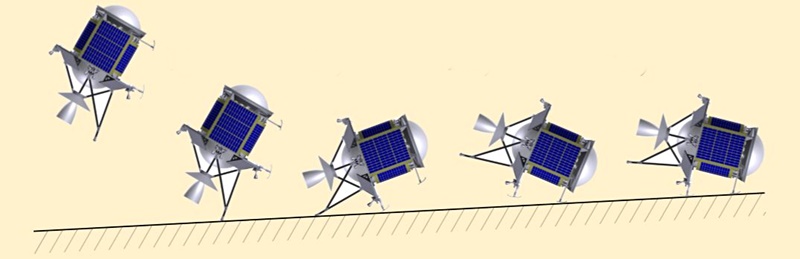
핀포인트 착륙은 지표면이 불규칙할 경우에도 궤도 수정 없이 자유롭게 착륙할 수 있는 기술이다. ‘슬림’의 착륙 예정지는 시올리(Shioli) 크레이터 부근으로 경사도는 약 15°다. ‘슬림’을 통한 핀포인트 착륙 기술이 입증될 경우 JAXA는 이를 한층 고도화하고 향후 개발하는 탐사선에 도입할 계획이다.
JAXS 관계자는 “미 항공우주국(NASA)의 아폴로 계획을 포함한 대부분의 달 탐사에서 탐사선 및 착륙선은 모두 수직 착륙 방식을 썼다”며 “평탄한 지형에 한정된 이 방법으로는 달 크레이터 내부 경사면 등에 기체를 내릴 수 없다”고 설명했다.

‘슬림’에는 ‘LEV-1’ 및 ‘LEV-2’라고 명명된 탐사 로버가 탑재됐다. ‘LEV-2’는 일본 완구 회사 타카라토미가 개발한 변신형 달 탐사 로버로 ‘소라큐(SORA-Q)’라는 원래 이름으로 더 잘 알려졌다. ‘소라큐’는 올해 4월 달 착륙 도중 추락한 민간 업체 아이스페이스의 ‘시리즈-1’ 착륙선에도 실린 바 있다.
‘슬림’의 달 착륙이 성공할 경우 일본은 미국과 러시아, 중국, 인도에 이어 달에 탐사 장비를 보낸 다섯 번째 국가가 된다.
정이안 기자 anglee@sputnik.kr