일본이 고대하던 달 착륙에 마침내 성공했다. 다만 착륙선에 장착된 태양전지의 발전이 불가능한 것으로 확인돼 향후 미션 전개에 관심이 쏠렸다.
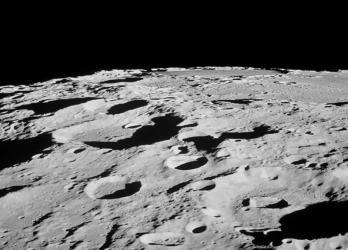
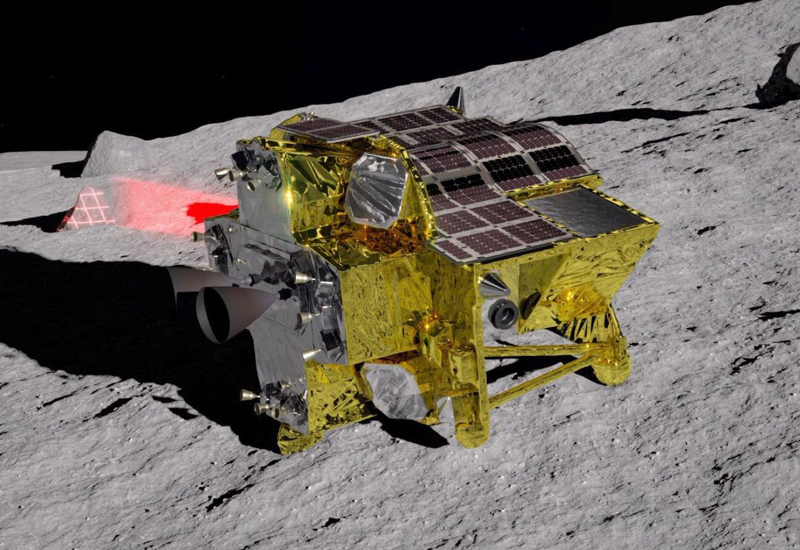
일본 우주항공연구개발기구(JAXA)는 20일 오전 공식 채널 및 SNS를 통해 달 착륙선 ‘슬림(SLIM)’이 예정된 위치인 시올리 크레이터 부근에 내려앉았다고 발표했다.
JAXA에 따르면, ‘슬림’은 이날 오전 0시20분 달 표면에 착륙한 사실이 확인됐다. 이로써 일본은 러시아와 미국, 중국, 인도에 이어 세계에서 다섯 번째로 달에 탐사 장비를 보낸 국가가 됐다.
‘슬림’ 탐사선은 태양전지 전력이 충전되지 않은 상태여서 예정된 미션의 수행 여부는 불투명하다. 20일 오전 1시 기준 ‘슬림’은 기존 배터리에 남은 전력만으로 가동되고 있다.
‘슬림’은 천체에 대한 탐사 장비의 핀포인트 착륙(pinpoint landing)의 가능성을 알아보기 위해 개발됐다. 핀포인트 착륙이란 말 그대로 평평하지 않는 지표면에 장비를 내리는 기술로, 실현될 경우 착륙 예정지 후보가 대폭 늘어나 우주개발이 한층 수월해진다.
JAXA의 X선 분광 위성 ‘크리즘(XRISM)’과 함께 ‘H-IIA’로켓에 실려 지난해 9월 7일 발사된 ‘슬림’은 곧바로 달로 향하지 않고 그해 12월 25일 월 주회궤도에 들어섰다. 이달 10일 착륙 준비 단계에 돌입했고 19일 밤 10시40분부터 달 타원궤도에 투입됐다. 20일 자정부터 강하를 시작한 ‘슬림’은 약 20분 뒤 달에 안착했다.

JAXA 관계자는 “착륙선의 태양전지는 아직 충전이 불가능한 상태이며, 배터리에 남아있는 전력만으로 가동되고 있다”며 “착륙 후에 전파가 수신된 점에서 기체가 파손됐다기보다 고정된 태양전지의 방향이 예상과 다른 쪽을 향했을 가능성이 크다”고 전했다.
이어 “히터 전원을 끄는 등 배터리 연장 조치를 취한 상황”이라며 “최악의 경우 미션 수행을 위해 최소한의 전력 사용이 불가피한 만큼 달 레골리스 관측을 위해 마련된 멀티 밴드 카메라(MBC) 가동을 최우선시할 것”이라고 덧붙였다.

JAXA는 ‘슬림’의 자세 제어 여부에 따라 향후 태양전지는 얼마든 충전될 수 있다는 입장이다. 이 경우 태양전지 전력 발생이 가능하므로 예정된 미션을 모두 수행할 것으로 JAXA는 기대했다.
한편 ‘슬림’에 탑재된 일본 완구 회사 타카라토미의 변신 달 탐사 로봇 ‘소라큐(SORA-Q, LEV-2)’ 및 ‘소라큐’와 연계된 미션을 담당할 송수신 장비 ‘LEV-1’은 예정된 고도에서 정상 사출됐다. 야구공 크기의 ‘소라큐’는 달을 주행하며 촬영한 사진 및 영상을 ‘LEV-1’을 통해 ‘슬림’으로 전송한다.
정이안 기자 anglee@sputnik.kr